
Force Sensing Resistor(FSR) or Printed flexible sensors which are identified physically as thin and lightweight sensors are slowly but steadily gaining momentum. They are a favorite among design engineers for a couple of years. This is due to the fact that apart from Printed Flexible Sensors being physically feasible, they are smart and power-efficient in their own way.
Know-how about FSR to the product designers is mandatory as these can prove an unparalleled option and cannot be ignored at any cost. Though these devices are powerful and compact, the embedded components which contribute in a complementary manner should also share those same traits.
Why use Force Sensing Resistor?
Force Sensing Resistor (FSR) or Printed Force Sensors or Force Sensitive Resistors are a large and growing category of embedded components. Further, it is important to note that due to a sense of recognition of their importance many new sensor types have been introduced lately. Using FSRs is like eliminating complex switch mechanisms as in the case of mechanical switches or dome-inspired membrane switches or even capacitive switches with silver conductors. Further, they can be utilized in Pressure mapping applications. Ain’t FSR credible and a swift and simple technology? Yes, indeed it is!
No matter developments in this sector have reached a peak and new developments are always in progress. Mind it, force-sensing resistors are not a new technology at all. Force sensing resistors are in use as an embedded component for decades.
This article shares the basics of force sensing resistor working principle, how they work, and how they can be used to capture force measurements as an embedded component within a device. Stay tuned!
How does Force Sensing Resistor Measure Force?
Mathematically, we all know Force is a product of mass and its acceleration ( or, F=M*A), or, applied pressure multiplied by contact area( F=P* Area). From an engineering perspective “F” may be represented using units such as Newton (N) or pound-force (lbf), and others.
When it comes to force-sensing resistors, they are not pre-calibrated so as they correspond to a known engineering unit. But, the output of force measurement captured by a force sensing resistor can be correlated to applied force by means of the calibration process.
Force sensing resistors are passive elements that function as a variable resistors in an electrical circuit. In short, they are a piezoresistive sensing technology. As shown in Figure below, the sensor without any load or force on it carries high resistance in the order of several Megaohms (MΩ) while when a force is applied the resistance drops considerably in order of Kiloohms (KΩ). When conductance is considered (inverse of resistance) , the relation is linear between conductance and the sensor’s designated force range.
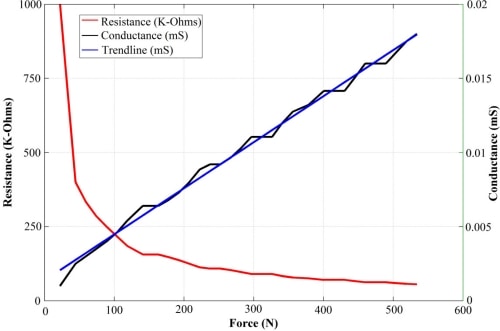
Characteristic Curve: Resistance vs. Force
Force Sensing Resistors are graphically denoted by Resistance vs. Force curve. Curves vary from model to model but can be generalized in the form of an equation: y = ax-b
The following graph is an example of a typical Single-Zone FSR actuated by a force on an automated dynamic test fixture.
Accuracy Limitations
When it comes to the accuracy of Force vs. Resistance of different sensor models, the figure revolves somewhere around +/-10%, even in a properly designed mechanical system with consistent actuation.
Force Sensing Resistors are not developed with an intention as a substitute for strain gauges or load cells (wherein high absolute accuracy is required). Having said this, Force Sensing Resistors have an upper hand in terms of cost-effectiveness and low physical profile. The Force Sensing Resistor price is feasible as against other alternate devices which possess relatively weak features and functionality. Especially, in applications where relative or course absolute force measurements are acceptable. The reasons behind these advantages being Force Sensing Resistors do not require bridge circuits or instrumentation amplifiers within their circuitry.
Force Sensing Resistors excel in applications where the human touch is involved, where 10% variance in absolute force is virtually not perceived. Hence, they are a good suit for membrane keypads where the user requires non-tactile feedback.
The relative accuracy of Force Sensing Resistor is much better, so they can be put to use to map force. FSR is reliable in cases where the distribution of force is of interest, and absolute force/weight is not that relevant.
Loading Hysteresis
Loading Hysteresis means the effect of previously applied forces on the current Force Sensing Resistor’s resistance.
Here’s an example:
Suppose a Force Sensing Resistor is idle at rest for some time. Next, when a 100-gram weight is placed on the resistor, the resistance of the FSR if measured is found to be 10kohms. Further, a large 5kg weight is placed on the FSR. After some interval of time, the 5kg weight is removed and again the 100-gram weight is set back on the sensor to observe the effects.
This time, the sensor resistance measures 6kohms and slowly creeps up toward 10kohms.
This loading hysteresis can be compensated using software algorithms, which are indeed very complex. It is often sufficient to simply limit load magnitude and duration to values that will not induce excessive hysteresis.
Thermal Drift
Ambient temperature imposes certain effects on Force Sensing Resistors, like any resistive sensor. To be specific, ambient temperature is directly proportional to the resistance of the Force Sensing Resistor. As ambient temperature increases, so does the resistance. This relation between the temperature and resistance in Force Sensing Resistor largely depends on ink composition and surface area of the Force Sensing Resistor and must be characterized or compensated in low drift applications.
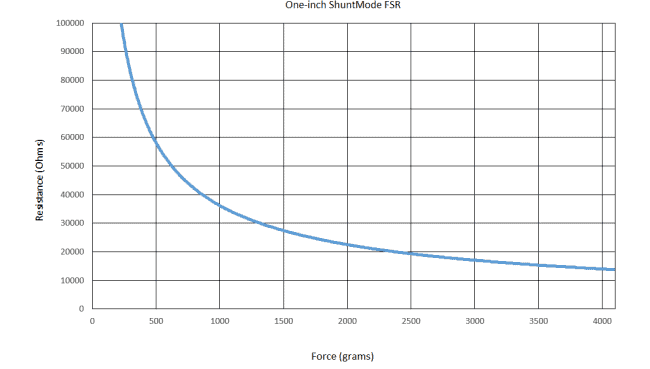
Distinguishing Force and Pressure
On a technical note, Force Sensing Resistors sense pressure (Force x Area) instead of force. For example, the resistance response will be varying for an equal magnitude of force by means of a finger and then by a stylus tip. This is due to the fact that the area of contact on the sensor will be different in both cases.
The effect of actuation variance of the example graphs is displayed below, which shows equal magnitude force applied to the same Force Sensing Resistor, using two different actuators (broad vs narrow tip).
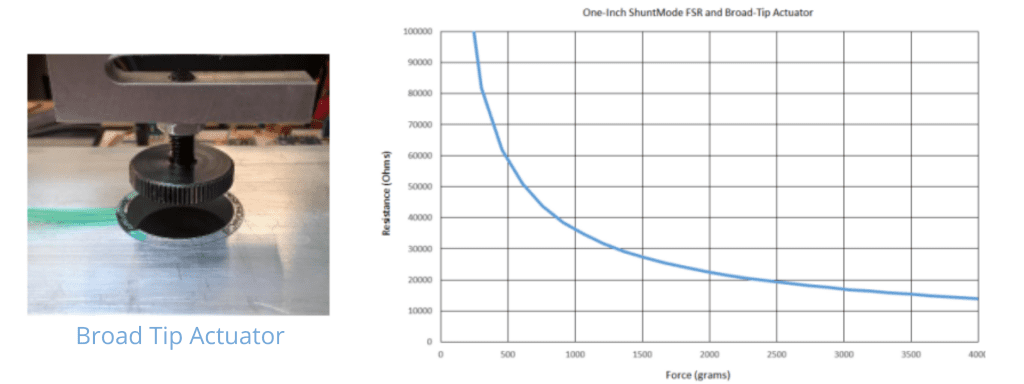
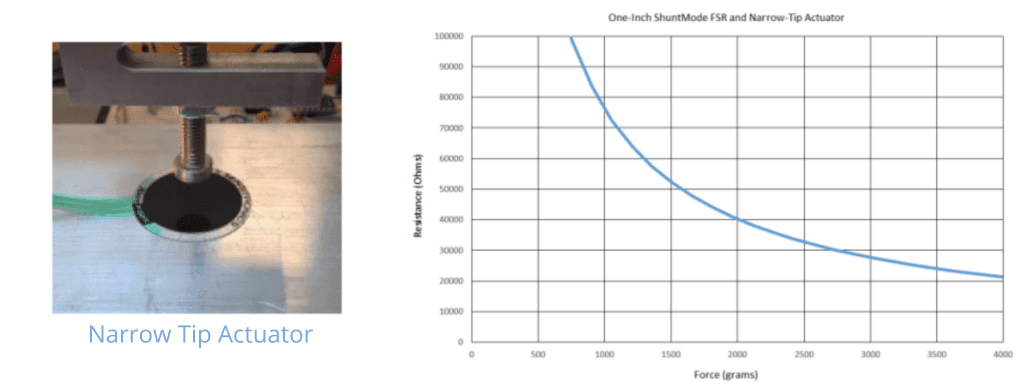
The significant difference in responses demonstrates the importance of consistent mechanical actuation in isolating force from pressure response.
Matrix or Single-Point Force Sensing Resistors
Force sensing resistors can be designed either as single-point force sensors or in a matrix array form, enabling the user to capture pressure distribution over a given area. Force sensing resistor matrices are commonly known as pressure mapping technology.
Force Sensing Resistors from Linepro Controls is a shunt force-sensing resistor variety. The flexibility of this technology to have the great operating capability and their feasibility to function on simple circuits make them a reliable option to embed into smart devices with limited space and power constraints. Force Sensing Resistors are also highly customizable. The shape, sensitivity, size, operating temperature, and electrical termination can all be customized to suit the application’s specific needs.
Application of Force Sensing Resistors
While Force Sensing Resistors are finding new uses in various industries, on a broader note, they fall in more or less among one of the following categories:
- Detecting or measuring a rate of change in force
- Detecting or measuring a relative change in force
- Detecting contact and/or touch
- Detecting force thresholds to trigger an action of some sort (e.g., IoT applications)

[…] the foot pressure sensor system, an electronic insole is created inside the shoe using the Force Sensing Resistor (FSR), a Printed Electronics Technology that monitors pressure wirelessly. Eight FSR sensors are […]